電動RCカーの仕組み
最終更新日: 2024年6月12日
1/10-1/8 スケール共通
ここでは電動RCカーの仕組みについて、簡単に説明します。
1/10電動RCカーと 1/8 電動RCカーでは、基本的な仕組みは同じですから、どちらをやる方も、こちらの基本的な仕組みは、しっかりと頭に入れてください。
特に、キットに含まれていない部分である「R/C カーの遠隔操作の仕組み」を中心に説明します。
RC カーの遠隔操作の仕組み
そもそも「RC カー」というのは「Remote Control」(遠隔操作) とか「Radio Control」(電波による操作) の略です。「電波」で「遠隔操作」するから、RC カーといいます。
ちなみに、米国アソシエイテッドで使われる RC10 等の名称の RC は、設計者のロジャー・カーティス (Roger Curtis) 氏に由来しています。
送信機と受信機
R/C カーは電波で車をコントロールします。まず、「送信機」(Transmitter) では、手元の操作を電波の信号として発信します。
それぞれの車に搭載された 「受信機」(Receiver) では、送信機から発信された電波を受信します。

「受信機」には、「サーボ」と「ESC」を接続します。受信機は、受け取った信号を「サーボ」(Servo) や 「ESC」に送り、それらを制御します。
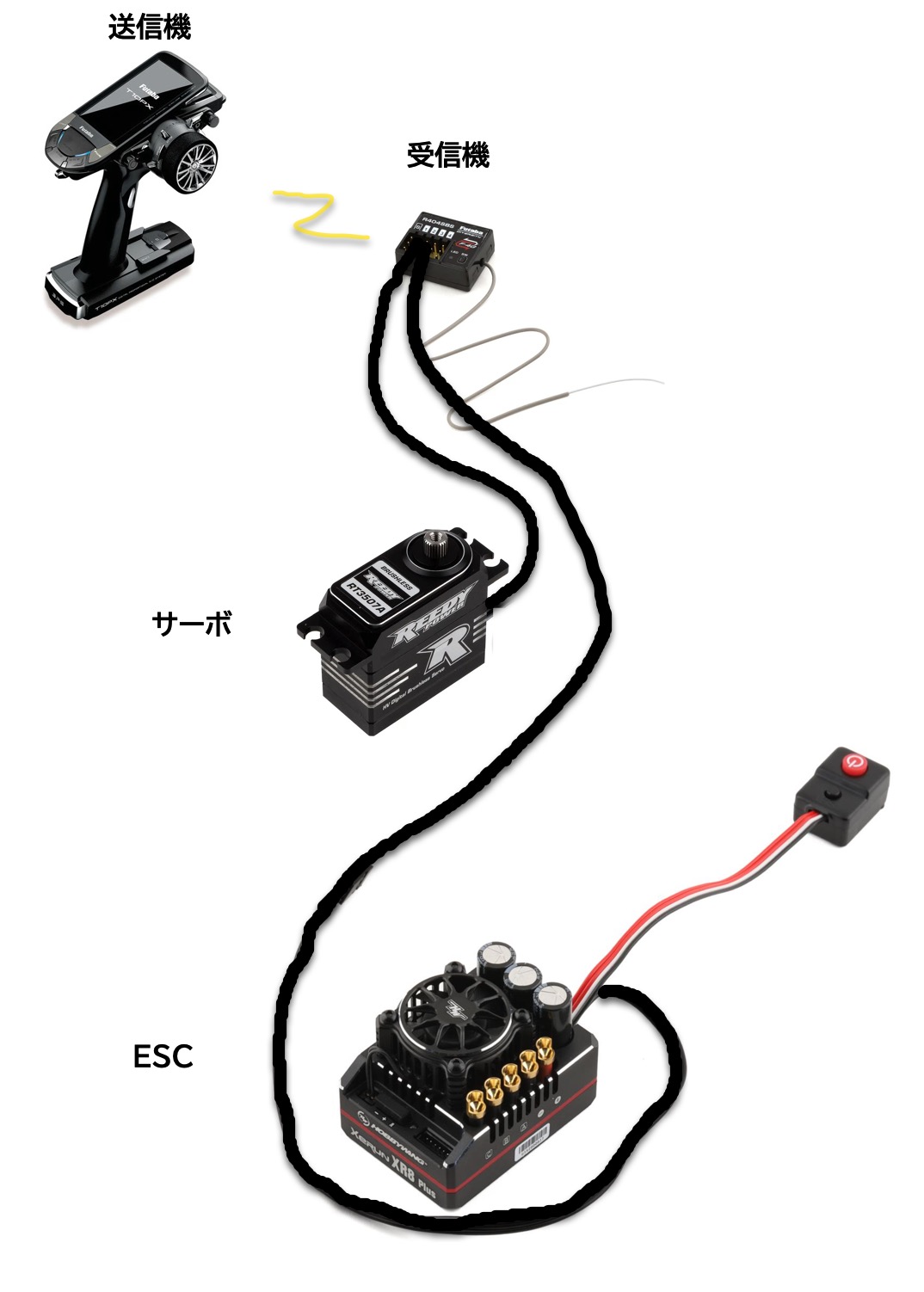
ステアリングを操作する「サーボ」
「サーボ」(Servo) は、送信機のステアリング・ホイールの操作と連動して動き、この動きを R/C カーのステアリング機構に伝えます。
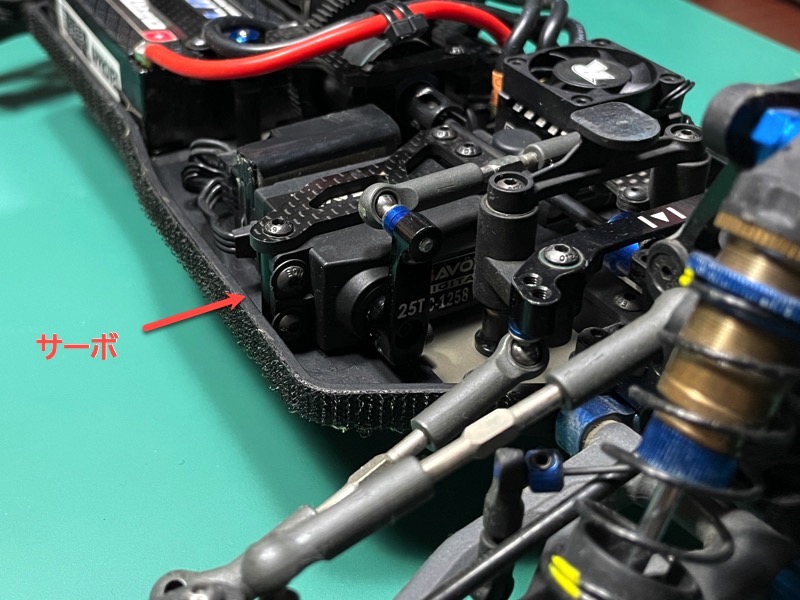
写真の車は1/10オフロードカーですが、E-Buggy でも仕組みは一緒です。
ビデオでわかるように、サーボには回転軸があり、回転軸が受信機からの指令で左右に操作した角度だけ動きます。この動きを、車に伝えることで前輪を左右に切ることができるようになります。
モーターを制御する「ESC」
「ESC」はエレクトロニック・スピード・コントローラ (Electronic Speed Controller) の略です。
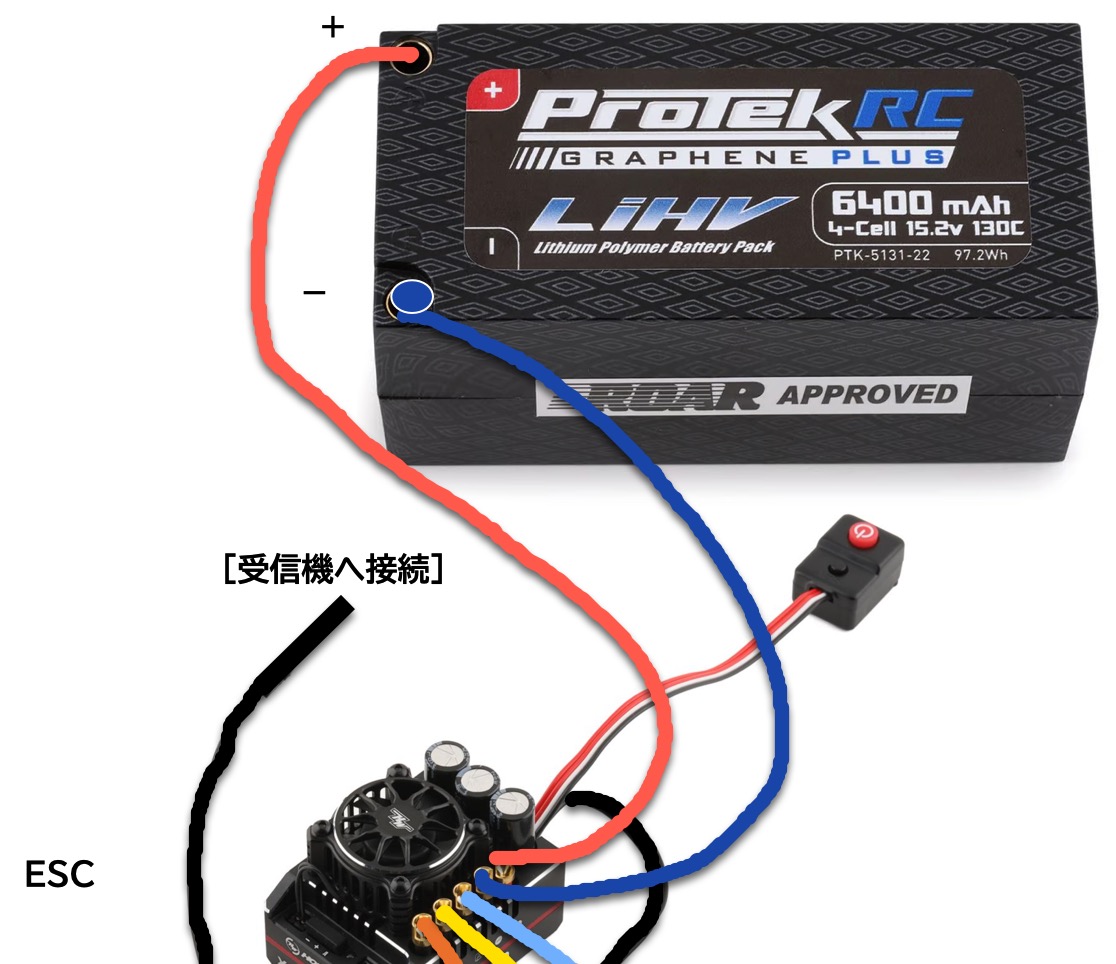
ESC は受信機に繋がれますが、さらに 「モーター」と「バッテリー」を接続します。 ESC は受信機からの信号を、R/C カーの動力となる「モーター」を動かすための信号に変換して、モーターを操作します。
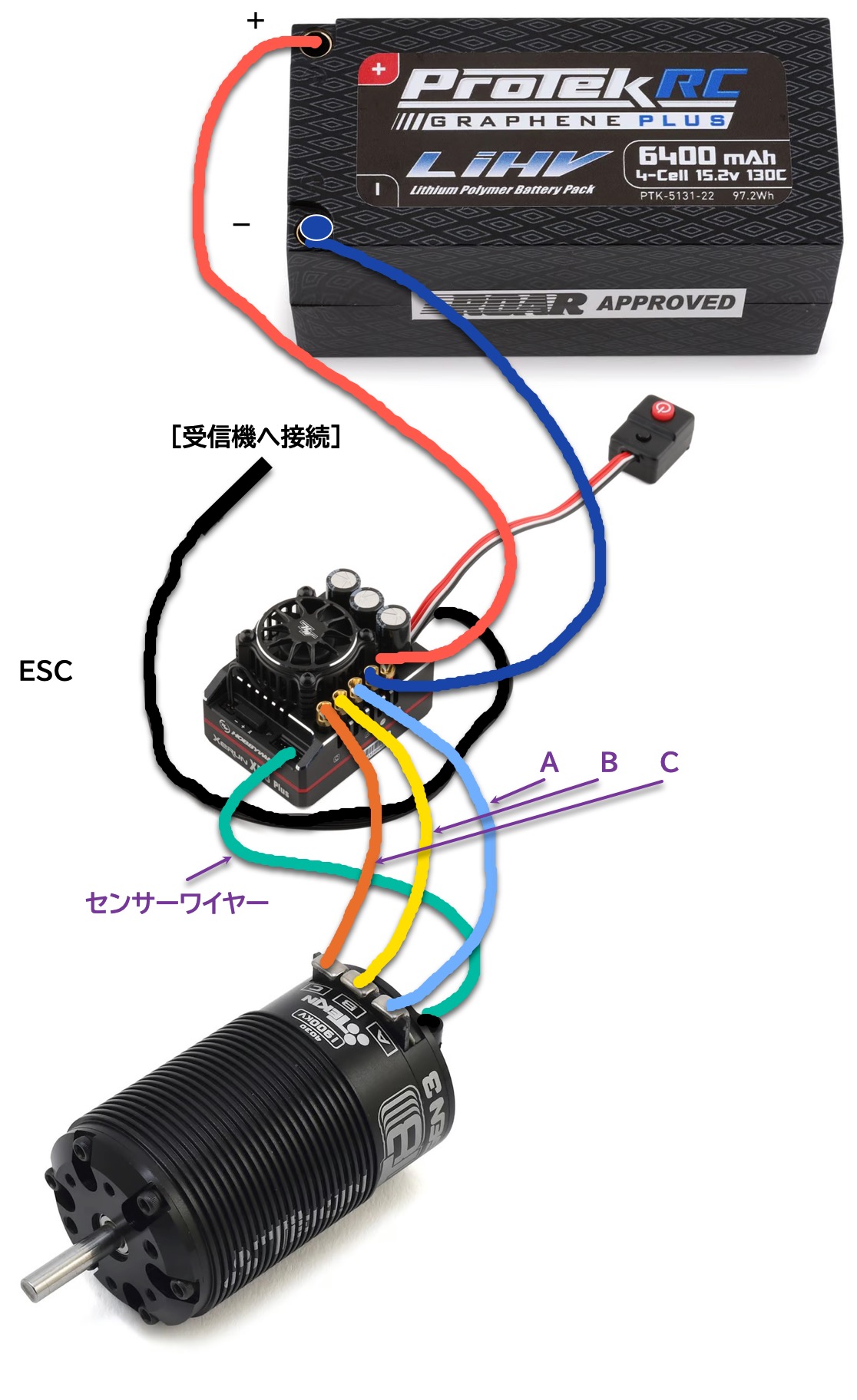
ESC に接続したバッテリーはモーターを動かすための電源となるのはもちろんのこと、その他に ESC から逆に「受信機」や「サーボ」に電源を供給することで、それらの電源として使われます。
モーター
RC カーで使われるモーターには様々な種類のモーターがありますが、当サイトで解説している RC レースで使うのは「ブラシレスモーター」 (Brushless Motor) という種類のモーターです。
1980年代のラジコンブームの頃のモーターは、全て「ブラシ」が付いている「ブラシモーター」でした。ブラシレスモーターというのは、その名の通り、ブラシが付いていないタイプのモーターです。
さらに、ブラシレスモーターは「センサー付き」と「センサー無し」の2種類がありますが、レースで主に使うのは「センサー付き」のブラシレスモーターになります。
具体的なモーターの種類等については、1/8 スケール電動オフロードカーについては「1/8 電動オフロードカーで使うモーター」をご覧ください。
ブラシレスモーターの接続
特に、昔ラジコンをやった経験があるかたには、上の図でモーターのワイヤーが多いな、と思われた方も多いと思いますので、少し細かい話になりますが、モーターの接続方法について簡単に触れておきます。
子供の頃のラジコンカーや各種工作等で使われてたモーターといえば、次のようなモーターではなかったでしょうか。

サイズは「380 (サンパチ)」とか「540」とかありましたよね。サイズに関しては今でも 540 サイズで、基本的に変わりはありません。
こうしたモーターを回転させるためには、単純に電池のプラスとマイナスを接続します。
しかし、ブラシレスモーターはそんな単純な仕組みではありません。電池を直接接続しても回転しません。というか、そもそもプラスマイナスを接続する場所もありません。ブラシレスモーターを回転させるためには、必ずスピードコントローラが必要になります。
ESC とモーターは、上の図のように A, B, C と呼ばれる3本のワイヤーと、さらにセンサーワイヤーとで接続されます。センサー無しブラシレスモーターでは、ABC の3本だけで、センサーワイヤーはありません。
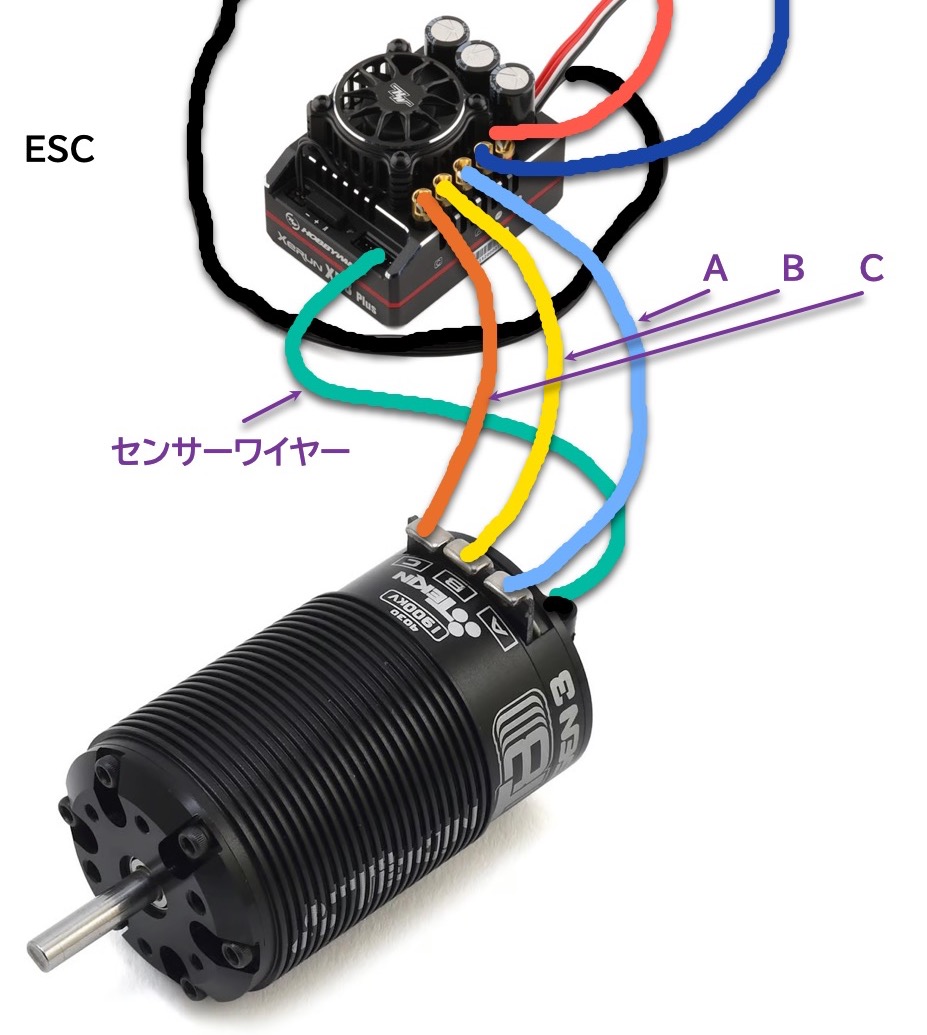
少し細かい話になりますが、A、B、C は動力用の電源を接続するためのワイヤーです。太いワイヤーを使います。
一方、センサーワイヤーは細いワイヤーが6本束ねられており、モーターのローター (回転子) の場所を検出するホールセンサーと温度センサーなどが接続されます。
バッテリーと使用電圧
レース用の RC カーでは、LiPo バッテリーという種類のバッテリーを使います。
LiPo は「リチウムポリマー」のことで、通常「リポ」バッテリーなどと呼びます。英語の発音だと「ライポ」と読みます。
1/10 スケールの電動オフロードカーでは、2S の LiPo バッテリーを使います。
2S というのは、バッテリー内部で、二つの電池が直列に接続されていることを表しています。LiPo バッテリーは 1 セルが、公称電圧 3.7V なので、2S だと 3.7V x 2 = 7.4V になります。満充電の状態では 8.4V になります。
1/8 スケールの電動オフロードカーでは 4S の LiPo バッテリーを使います。4S では電圧が 3.7V x 4 = 14.8V。 満充電時には 16.8V です。
尚、4S にするためには、4S の LiPo バッテリーを1個使う場合と、2S の LiPo バッテリーを2個直列に繋いで、4S とする場合の2通りあります。どのタイプのバッテリーを搭載するかは、車 (キット) によって違います。 詳しくは「1/8 電動オフロードカーで使うバッテリー」をご覧ください。
LiHV バッテリー
ちなみに、LiPo バッテリーには、「HV (High Voltage = 高電圧) バッテリー」というのもあります。LiHV あるいは LiPo-HV 等と表記されます。
LiHV バッテリーは、1セルあたり 3.8V 等までの充電をサポートしている電池です。 この場合、公称電圧は 2S で 7.6V、4S で 15.2V になります。このタイプもレースで使用することができます。
しかし、LiHV を使用する場合でも、通常、レースのルール上は満充電時に 2S では 8.4V まで、4S では 16.8V まで、と決められていますから、それ以上充電しないように気を付けましょう。
充電可能電圧のルール等は、参加するレースによって異なる場合もありますので、詳しくはレースの主催者にご確認ください。通常は、アメリカなら ROAR ルールが基本であり、ROAR ルールと異なる点について、各レース毎に詳細が案内されるのが普通です。
駆動系 - モーターでタイヤを回す仕組み
電動RCカーは、モーターでタイヤを回転させます。モーターの力でタイヤを回す仕組みは、大まかに次の図のようになります。
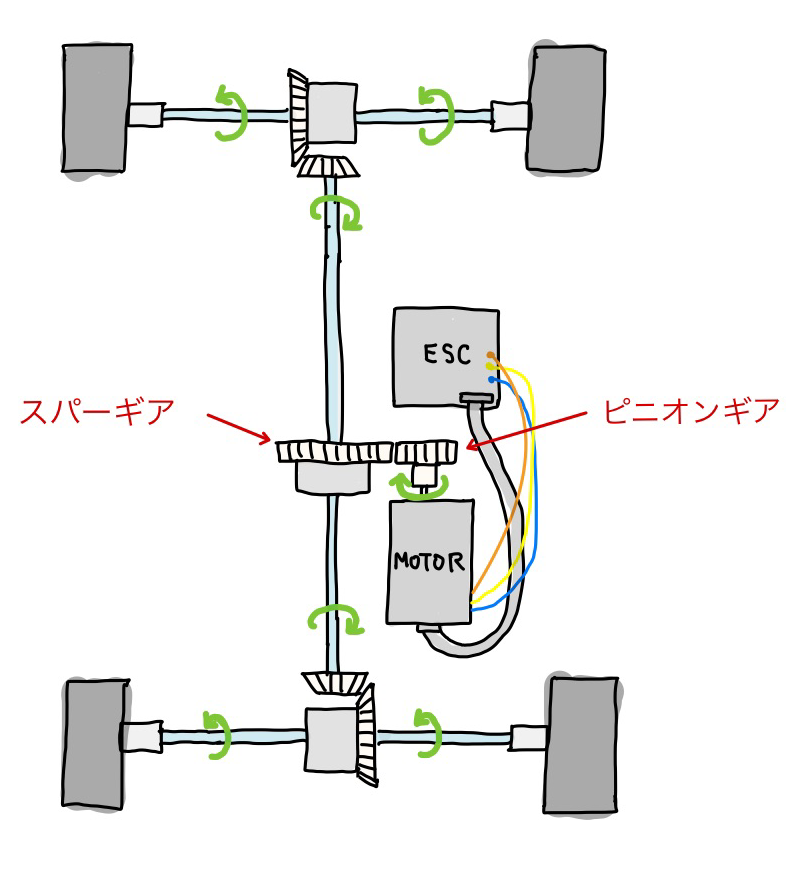
モーターの回転軸に直接取り付けられるギアを「ピニオンギア」といいます。ピニオンギアが回す一つ目のギアのことを「スパーギア」といいます。
ピニオンギアとスパーギアは、通常脱着可能になっており、車の走り心地を決める大事な調整項目のひとつになります。
スパーギアは、中央に取り付けられているギア (センターデフギア) に取り付けられており、スパーギアが回転すると中央前後の駆動軸 (センタードライブシャフト) が回転します。
センタードライブシャフトは、車の前側と後ろ側に取り付けられているべべルギアを回します。ベベルギアで、軸の回転方向が90度変えられ、それが前後のタイヤにつながる、ドライブシャフトを回します。こうしてモーターの回転が、タイヤの回転に変換されます。
以上が、R/C カーを遠隔操作する仕組みと、電動RCカーの典型的な駆動系の仕組みになります。
この他にも、車を左右に動かすためのステアリング機構や、走行中の外力を吸収して車を安定させて走るためのショックアブソーバーの仕組みなど、 RCカーには、いろんな工夫が詰まっています。
しかし、そうした点は車 (キット) を選び、説明書に従って組み立てることで決まってしまうことですから、購入前にあまり心配する必要はありません。
以上、ここでは電動RCカーの仕組みについて概要を説明しました。