OCRC クラブレース結果 ~ 考えずに走ることで速く
7/5/2015
7月5日(日)も OCRC でクラブレースに参加してきました。アメリカ独立記念日の連休だったので、普段あまりレースで見かけない懐かしい人たちも来てました。
それから女子サッカーの W杯の決勝、米国vs日本があって、OCRCでも試合の様子がテレビに映されてました。

さて、さっそくクラブレースの結果です。
4WD Mod Buggy
久しぶりにエントリーは多くて 11 人もエントリーがありました。エントリーが集まらずちょくちょくキャンセルになるので、いつも 4WD Buggy は レースがあるかどうか心配なのですが、今日は賑やかでよかったです。
しかも、なかなか走る人が多かったで、エントリーが多かったわりにちゃんとレースになってました。
久しぶりにアレックス・ガレロも来てました。彼は昔、リーディーレースのオープンクラスで優勝経験があり、 ちょっと前までデュランゴのレーサーでしたが、今調べてみたらトレスレイUSAのスポンサード・ドライバーなんですね。
WCRC で走っていた頃、たまに教えてもらっていたので久しぶりでした。
さて、予選ラウンド1の結果はこちら。
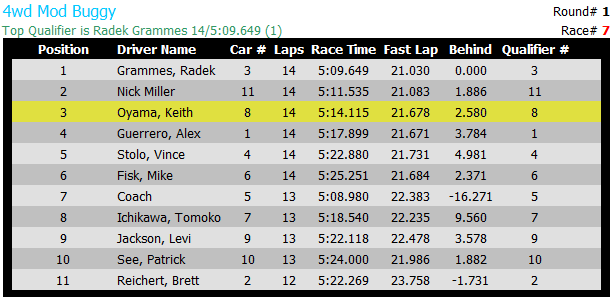
無難にまとまり、ラデック (LRP)、ニックミラー (プロライン) に続き3位。
予選ラウンド2はこちら。
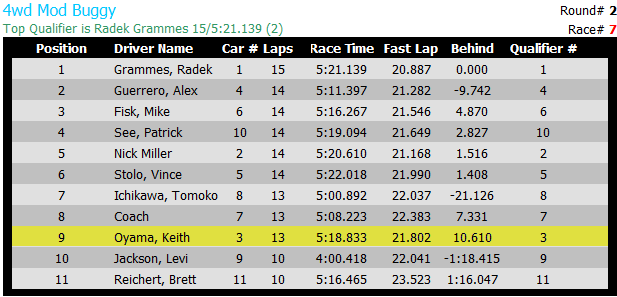
せっかくラウンド1が3位で上位で走れるところが、序盤でミスしてしまい、しばらくトラフィックの多いところに混ざって走ることになってしまいました。
それなりに頑張って走りましたが、まともに自分のペースで走れなかったので、どんなタイムになったか結果が怖かったですが、13周に入ってて良かったです。
以上で、11人中予選4位。
メインレースの結果は次の通り。珍しく2位に入れました。

ラデックはもともと安定感があったのですが、最近スピード速くなってきて追いつく気がしないですね・・・ それでも、時々ミスしてたようで終盤にだいぶ近づけたのですが、プレッシャーをかけるまではゆかずあっさりと先へ行ってしまいました。
ニックミラーはとにかく一発があって速いです。ダブル・シングルのところを、いきなりトリプルで上を行かれてしまい、一度抜かされましたが、 どうにか抜きかえしてギリギリセーフで逃げきれました (0.4秒差)。ゴール後、がっちり握手。良いレースで、うれしかったです。
Mod Buggy
こちらもエントリーが多くて、全16エントリー。Mod buggy は2ヒートありました。
予選ラウンド1の結果はこちら。
そこそこ走っていたつもりでしたが、数回ビッグダブルでひっくり返ってしまいダメでした。
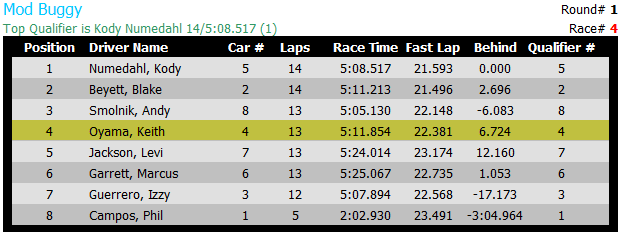
予選ラウンド2の結果はこちら。

急にタイムがあがりました。これについては後述します。
以上で、16人中5位。A メイン。
メインレースの結果はこちら。

残念なことに、練習ラップでコケてしまい、練習がほとんど走れないままのスタートで前半のクラッシュが響いてしまいました。
といっても、タイムが普段より出てない人が多いので、路面がいつもより状態が良くなかったのかな?という気もしますが・・・。
いずれにせよ、平凡なタイムで終了。
コケまくっていて、見どころも何もありませんが、Aメインの僕の様子はこんなでした。
考えずに走る
上のビデオの通り、こけまくっていた人が言うのもなんですが、今日は自分なりにかなり収穫がありました。
4WD では 2位。2WD では 0.3秒ラップタイムを短縮でき、さらに 16人中予選5位でメイン6位と自分ではなかなかの健闘です。
今回自己ベストを 0.3秒短縮できたことで、アソシのコディ・ニューメダールからファストラップで 0.5秒落ちまでこれました。 今年の世界戦代表選手であるアンディ・スモルニックにも予選・メインともに勝てました。
今日、特に気をつけていた点を書いておきたいと思います。
それは、車の様子を感じることに気持ちを集中し、操縦については一切考えず、良いラインを走ることを心がけるということです。
ブログにも何度か書きましたが、これが上手くいくのには理由があって、考えてから手が動くまでの時間はかなり遅くて、0.3秒から0.5秒近くかかるんですね。 だから考えて操縦してたら絶対に速くなれないんです。
あるところで、伸び悩みます。
ところが、人間にはイメージ記憶というのがあるそうで、上手く行くときの状況を一連の流れとして覚えて置くことができて、それがスポーツでは活躍するのだそうです。
詳しくは以前、イメージ記憶について書いたブログエントリーをみてください。
イメージ記憶を呼び起こすことが大事、ということまでは知識とか理屈で分かっていたのですが、それをラジコンにどう適用するか、分かりかねていました。
以前は、「上手く行ったときのイメージを頭に入れつつ操縦する」という風に理解していたのですが、それでは上手く行かなかったのです。
それが今日わかりました。
ラジコンカーのレースの場合は、どうやら上手く行ったときのイメージで走ろうと思ったらかえってダメです。 同じ場所に来たときに同じように操縦しようとしても、路面の状態、車の状態が同じではないので、上手く走ったときの操縦を繰り返してもダメなのです。
上手く行ったときの走り方を繰り返すのではなくて、 臨機応変に車の様子、ヨレ具合、滑り具合、進み具合を感じることが、そのイメージ記憶を引き出すことになるということに気づきました。
僕が車の様子を感じると、車が勝手に走っていくイメージです。
これは実は何も特殊な話ではなくて、実車を運転しているときはたいていの人がそんな感覚だと思います。
スピードを出したいときに、「アクセルを少し踏み込もう」 とか「ハンドルをこの位切ろう」とか考えている人はほとんどいないと思います。スピードを出そう、カーブを曲がろうと思ったときに、 ほとんど無意識のうちに適切にハンドルを切り、それとともにスピードを落としたりしているはずです。
さらに、なんとなく隣の車が車線を変更してきそうだから、避けておこうとか、 そういう状況も感じ取りながら車を運転していると思います。
ラジコンでも同じです。
車の状態を常に感じつつ、良いラインに乗せるように気をつけていくと、タイムが自然と出てくるようです。